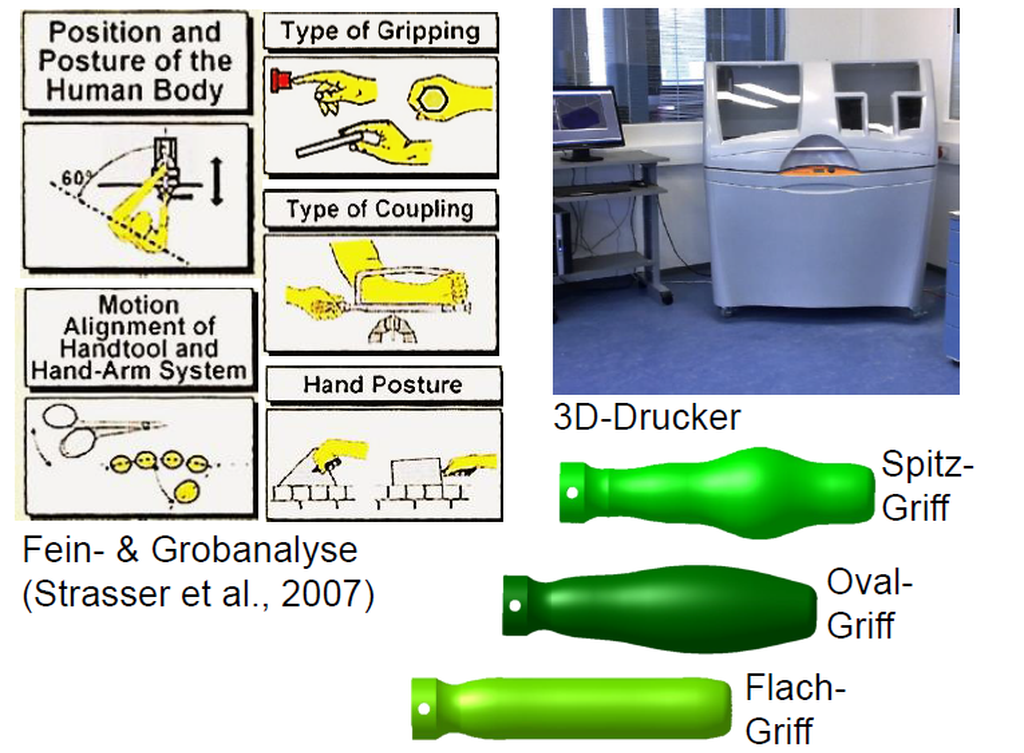
The comfort optimization method for work equipment based on a digital hand model is derived from the example of an iron bender. It comprises both comfort analysis and comfort optimization.
The aim of comfort analysis is to derive a work-equipment-dependent pressure discomfort model (PDT model) for the palm of the hand. The first step in determining the PDT model is to define and analyze the significant variables influencing the work equipment on the hand side and work side. Hand-side factors include gripping and coupling type, hand and body posture, but also hand types. Work-side factors include the level of force and force direction, as well as the kinematics of the applied force.
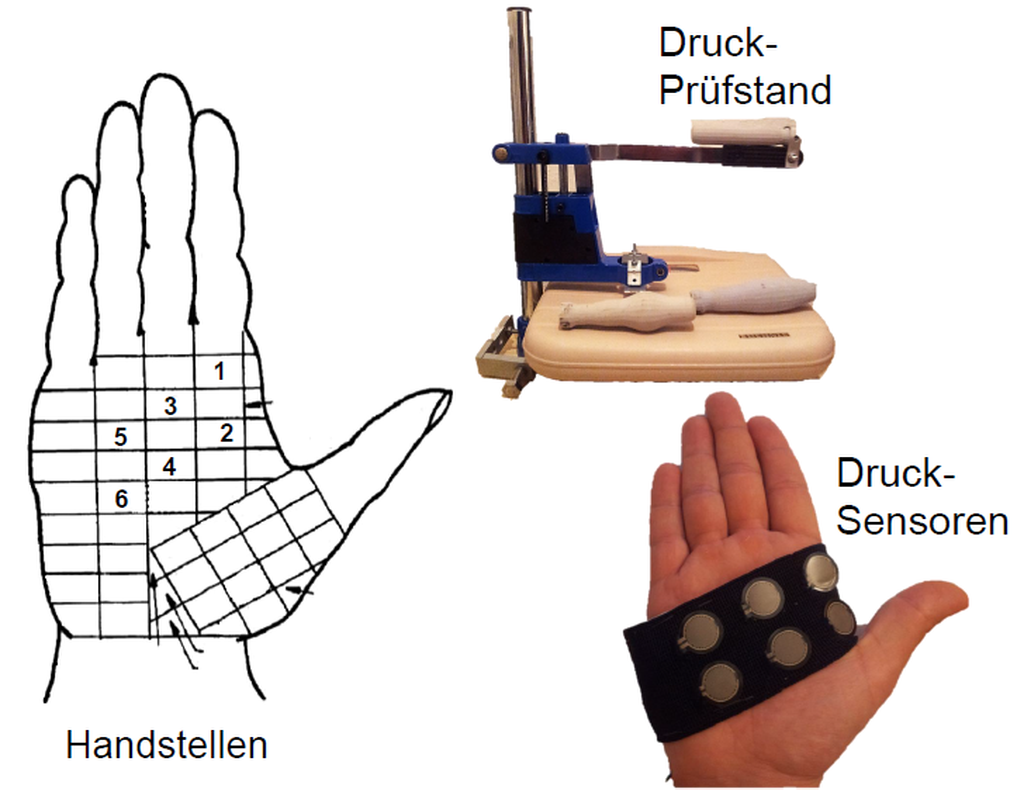
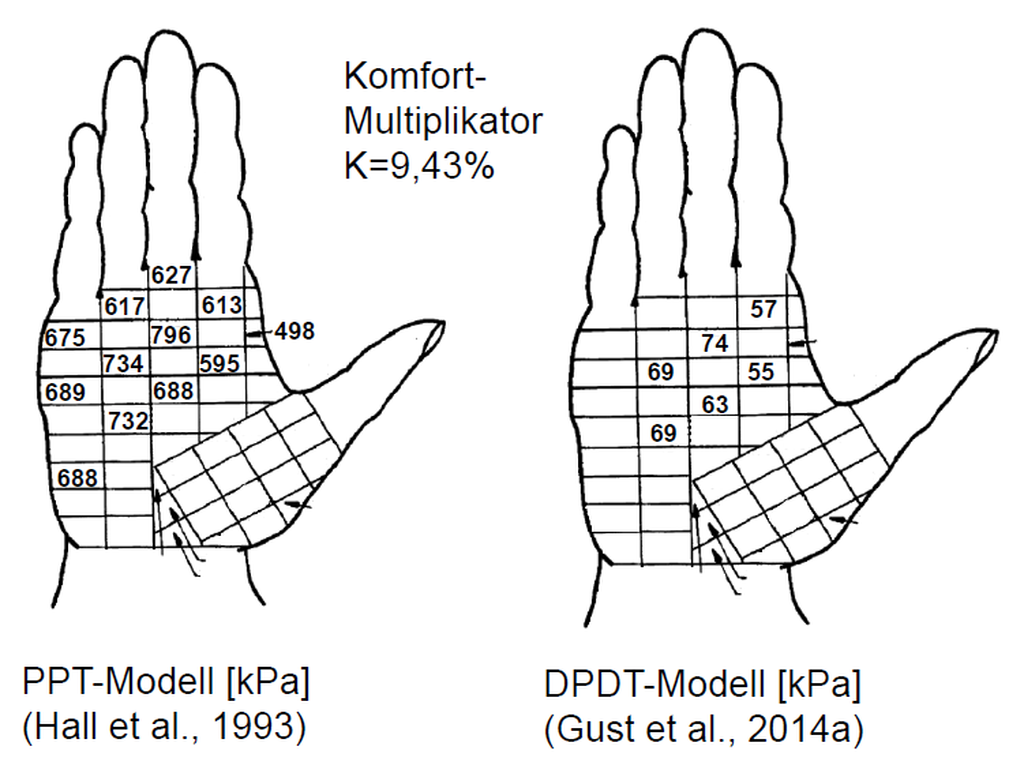
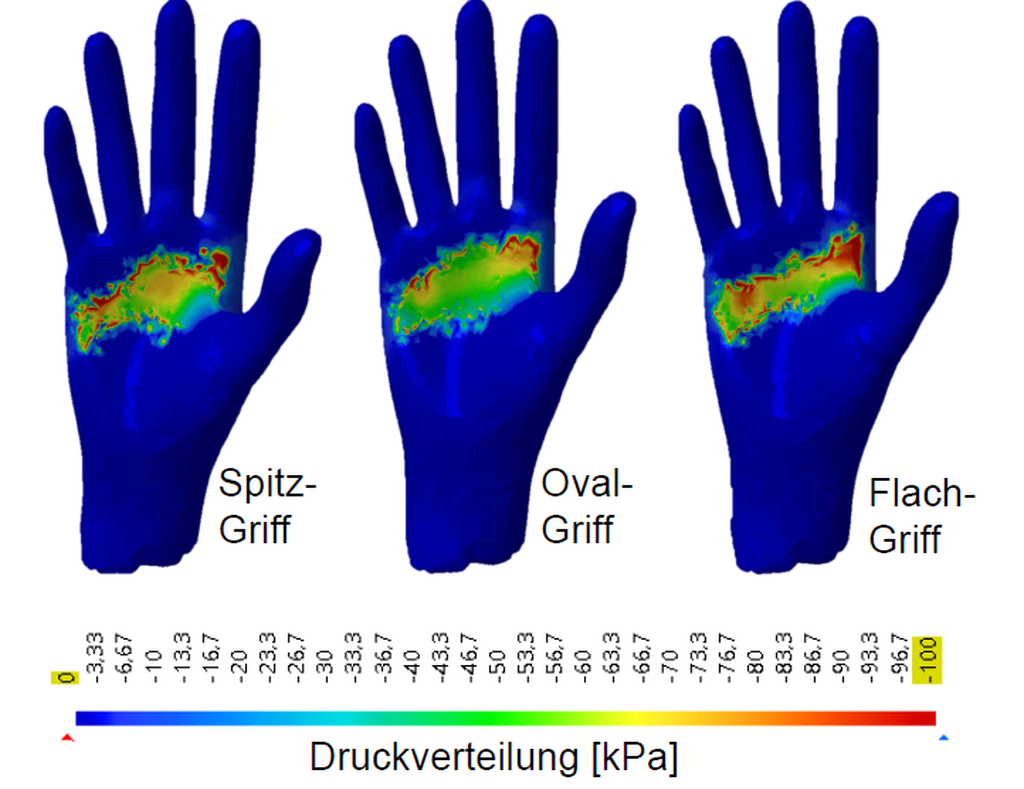
Secondly, pressure distributions between grip and palm have to be measured in relation to varying handle design parameters. From the pressure distributions and the pressure pain threshold (PPT) of the palm as measured, a work-equipment-dependent multiplier can be determined. Subsequently, this multiplier can be used to transform the PPT values to the PDT values.
The difference between PPT and PDT gives the tolerance range of upper and lower pain thresholds. The lower pain threshold is the so-called pressure discomfort threshold (PDT), which is work-equipment dependent. Embedded in a discomfort model, this PDT can already be used as a guideline for the evaluation of pressure distribution for gripping, so that the designer can decide after a few minutes how the handle will feel after several hours.
Grip comfort optimization is thus derived from a work-equipment-dependent PDT model based on a digital hand model. For this purpose, a simulation model of the human hand must first be created. This can be derived in the form of a skeleton model from open source programs such as "OpenSim", and in the form of a soft tissue model from "MakeHuman", and these models can be scaled in a CAD program such as CATIA V5 to the desired hand sizes.
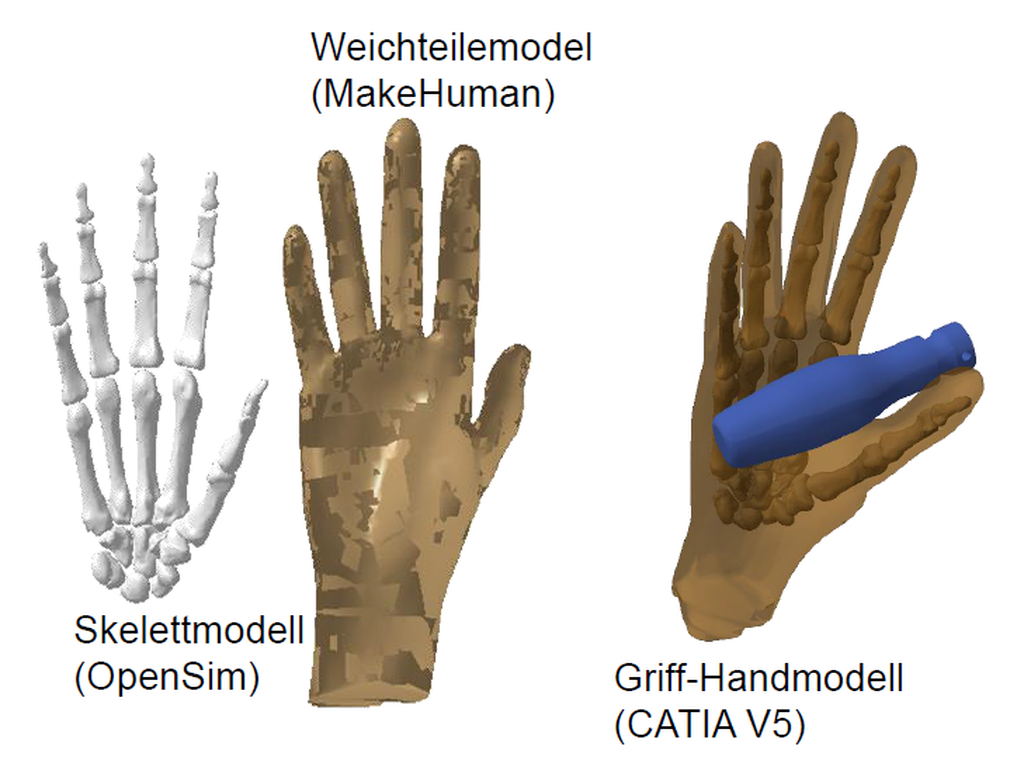
The simulation model must also reflect the information from hand-side and work-side comfort analysis. Manipulations such as gripping and coupling types, as well as hand position, must be transferred to the CAD system. After proper positioning of the grip on the palm, and the definition of boundary conditions such as contact and load conditions, the entire range of parameters can be meshed into a single model.
Grip comfort optimization can finally be performed by varying different handle design parameters and checking the PDT borders. The aim is to bring the pressure peaks below pressure discomfort thresholds.

Sources: Gust, P., Ünlü, A. (2014a). „Method to handle comfort optimization of work equipment based on a digital hand model“ . AHFE - 5th International Conference on Applied Human Factors and Ergonomics, Kraków Polen; Gust, P., Ünlü, A. (2014b). „Developing a comfort evaluation method for work equipment handles“ . Design 2014 - 13th International Design Conference, Dubrovnik - Cavtat – Croatia; Hall, C. F., Kilbom, A. E. (1993). “Sensitivity of the hand to surface pressure”. Applied Ergonomics; Strasser, H., Bullinger, H. J. (2007). “Assessment of the Ergonomic Quality of Hand-Held Tools and Computer Input Devices”. Amsterdam: IOS Press, Ergonomics, Human factors and Safety, Vomule 1.
 ECN Award For Ergonomics
ECN Award For Ergonomics